Contents
Example 4: LTI model of a Coleman tranformed wind turbine system
close all; clear; clc;
LTI model of a Coleman tranformed wind turbine system
% LTI system matrices h = 0.1; % Sample time [OL,CL] = wtsLTI(h); % The wind turbine model n = size(OL.a,1); % The order of the system r = size(OL.b,2); % The number of inputs l = size(OL.c,1); % The number of outputs
Closed-loop identification experiment
Simulation of the model in closed loop
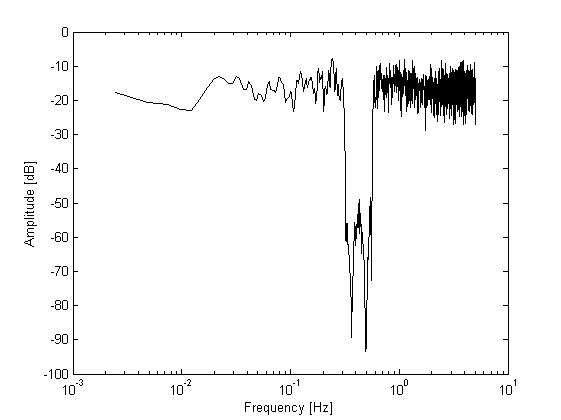
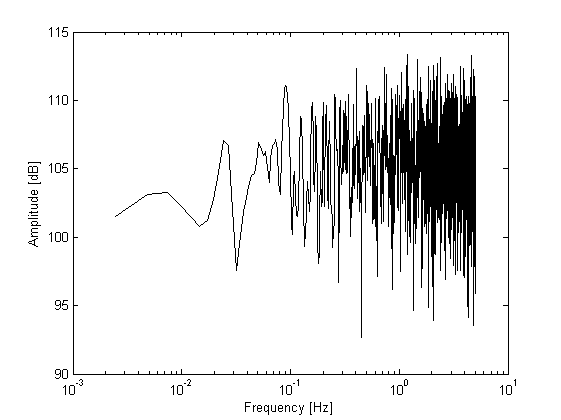
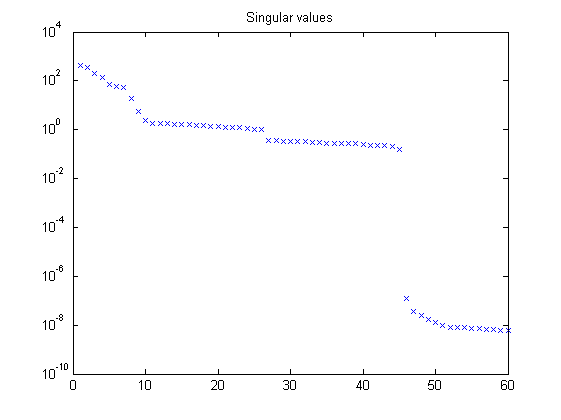
% Time sequence N = 10000; % number of data points t = (0:h:h*(N-1))'; % Wind disturbance signals d = randn(N,3); % Excitation signal for pitch input r_pitch = idprbs(N,1,h,5,0.4440,0,2); ns = floor((length(r_pitch)-N)/2); r_pitch = r_pitch(ns+1:N+ns,1); % Plot PSD [M,F] = pwelch(r_pitch,[],[],[],1/h); figure, semilogx(F,mag2db(M),'k','LineWidth',1) xlabel('Frequency [Hz]'); ylabel('Amplitude [dB]'); % Excitation signal for Torque input r_torque = idprbs(N,1e3,h,5,inf,0,2); ns = floor((length(r_torque)-N)/2); r_torque = r_torque(ns+1:N+ns,2); % Excitation signal for Torque input [M,F] = pwelch(r_torque,[],[],[],1/h); figure, semilogx(F,mag2db(M),'k','LineWidth',1) xlabel('Frequency [Hz]'); ylabel('Amplitude [dB]'); % Add together for simulation r = [r_pitch zeros(N,2) r_torque zeros(N,2)]; % Simulation of the closed-loop system y = lsim(CL,[d r],t); % Input and output selaction with scaling ui = detrend(y(:,7:8),'constant'); % selects input for identification (excitation of pitch + control) yi = detrend(y(:,1:3),'constant'); % selects output for identification ri = [r_pitch r_torque]; [us,Du,ys,Dy] = sigscale(ui,yi); % signal scaling % Closed-loop Spectral Analysis [G,w] = spaavf(ui,yi,ri,h,10); OLa = frd(G,w); % Defining a number of constants p = 50; % past window size f = 20; % future window size % PBSID-opt [S,x] = dordvarx(us,ys,f,p,'tikh','gcv'); figure, semilogy(S,'x'); title('Singular values') x = dmodx(x,n); [Ai,Bi,Ci,Di,Ki] = dx2abcdk(x,us,ys,f,p); %[Ai,Bi,Ci,Di,Ki] = dx2abcdk(x,us,ys,f,p,'stable'); % forces stability Dat = iddata(ys',us',h); Mi = abcdk2idss(Dat,Ai,Bi,Ci,Di,Ki); % Variance-accounted-for (by Kalman filter) yest = predict(Mi,Dat); x0 = findstates(Mi,Dat); disp('VAF of identified system') vaf(ys,yest.y)
Warning: The frequency to be filtered out, Inf Hz, is larger than the cutoff frequency 5 Hz Warning: >>> Skipping band stop filtering around Inf Hz <<< VAF of identified system ans = 99.9730 98.4171 99.9374
Prediction error method optimization
% Optimize identified system set(Mi,'SSParameterization','Free','DisturbanceModel','Estimate','nk',zeros(1,2)); Mp = pem(Dat,Mi); % Variance-accounted-for (by Kalman filter) yest = predict(Mp,Dat); x0 = findstates(Mp,Dat); disp('VAF of optimized system') vaf(ys,yest.y)
VAF of optimized system ans = 99.9739 98.4633 99.9454
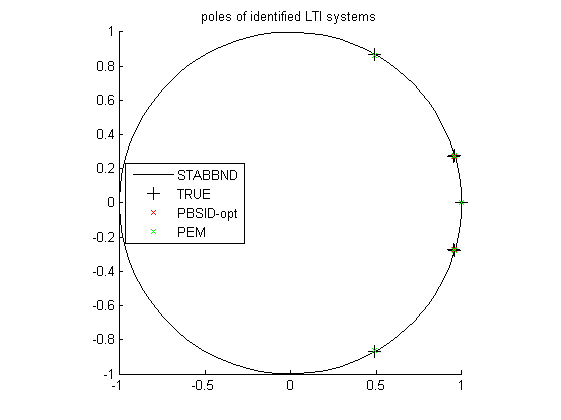
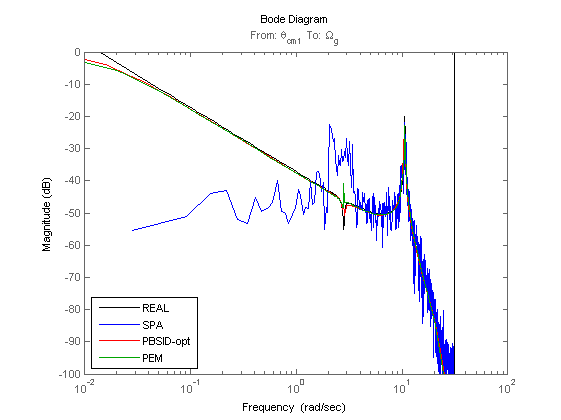
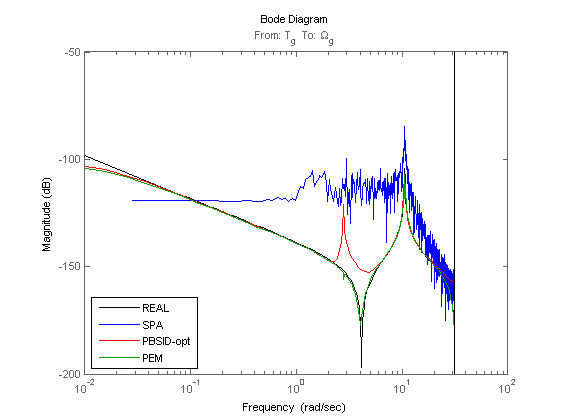
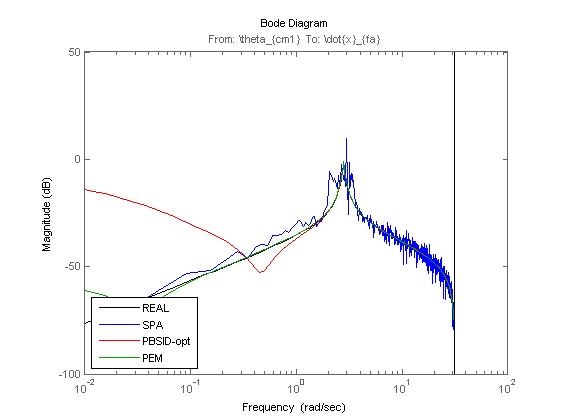
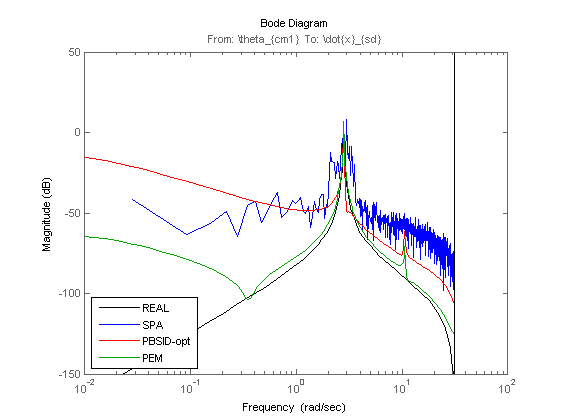
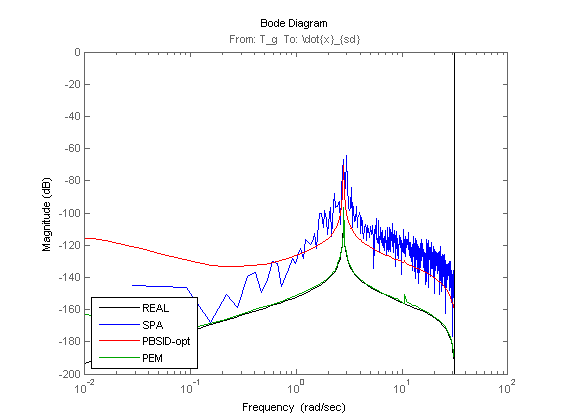
Identification results
% Plot eigenvalues figure hold on title('poles of identified LTI systems') [cx,cy] = pol2cart(linspace(0,2*pi),ones(1,100)); plot(cx,cy,'k'); plot(real(eig(OL.a)),imag(eig(OL.a)),'k+','LineWidth',0.1,'MarkerEdgeColor','k', 'MarkerFaceColor','k', 'MarkerSize',10); plot(real(eig(Mi.a)),imag(eig(Mi.a)),'rx'); plot(real(eig(Mp.a)),imag(eig(Mp.a)),'gx'); axis([-1 1 -1 1]); axis square legend('STABBND','TRUE','PBSID-opt','PEM','Location','West'); hold off % Bodediagram (open loop) OLi = ss(Mi); OLp = ss(Mp); OLi = Dy*OLi(1:3,1:2)*inv(Du); OLp = Dy*OLp(1:3,1:2)*inv(Du); figure, bodemag(OL(1,4),'k',OLa(1,1),'b',OLi(1,1),'r',OLp(1,1),'g'); axis([0.01 100 -100 0]); legend('REAL','SPA','PBSID-opt','PEM','Location','SouthWest'); figure, bodemag(OL(1,7),'k',OLa(1,2),'b',OLi(1,2),'r',OLp(1,2),'g'); axis([0.01 100 -200 -50]); legend('REAL','SPA','PBSID-opt','PEM','Location','SouthWest'); figure, bodemag(OL(2,4),'k',OLa(2,1),'b',OLi(2,1),'r',OLp(2,1),'g'); axis([0.01 100 -100 50]); legend('REAL','SPA','PBSID-opt','PEM','Location','SouthWest'); figure, bodemag(OL(3,4),'k',OLa(3,1),'b',OLi(3,1),'r',OLp(3,1),'g'); axis([0.01 100 -150 50]); legend('REAL','SPA','PBSID-opt','PEM','Location','SouthWest'); figure, bodemag(OL(3,7),'k',OLa(3,2),'b',OLi(3,2),'r',OLp(3,2),'g'); axis([0.01 100 -200 0]); legend('REAL','SPA','PBSID-opt','PEM','Location','SouthWest');