MSc Thesis Proposal
Cooperating-controllers model predictive control
Mentors: Rudy
Negenborn, Bart
De Schutter
Keywords: cooperating controllers, model predictive control,
distributed control, multi-agent systems
Description:
In a conventional control setting, there is a single controller that
controls the system. This controller collects information from
measurements of the system to determine which inputs to
select. However, many real world systems, like for example traffic,
water, and power networks are large in scale, and therefore hard to
control by a single controller, since this controller would have to
gather information from all sensors, and process this directly to
provide inputs to all actuators. This is not only hard due to
technical issues like communication delays and computational
requirements, but also due to practical issues like unavailability of
information from one part of the network to another and restricted
control access. For this type of systems a control approach with
multiple controllers has to be employed.
In such a multi-controller setting several controllers, each with only
limited information gathering and processing skills and moreover
limited action capabilities, control the subsystems (e.g.,
subnetworks) of which the overall network is composed. Since the
subsystems they control are part of an overall network, inputs
selected by one controller influence inputs selected by other
controllers. The challenge for this type of control is therefore to
make the controllers cooperate, that is, work together, such that the
overall network performance is as desired. In our case, we investigate
how such a scheme works when the controllers employ model predictive
control (see Figure 1).
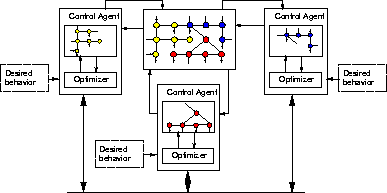
|
Figure 1: Illustration of multi-controller model predictive
control. Control agents control parts of the overall network. Each of
the controllers has a model of the subnetwork it controls.
Controllers communicate with neighboring controllers. Through an
optimization procedure they decide which inputs to implement on their
subsystems. |
Assignment:
In this project you consider a control setting in which a power or
traffic network is divided into subnetworks, each controlled by a
controller using model predictive control. You look at how the network
can be split up into smaller parts and how the controllers have to
cooperate with one another to obtain good overall system behavior (for
example by exchanging predictions about what each controller expects
to do in the future).
If you are interested in selecting this project as your MSc project,
please come along or send us an email for more information.
This page is maintained by
Bart De Schutter.