autonomous rovers
using small scale RC cars as autonomous rovers
In order to test control algorithms for ground and aerial drones, our lab is equipped with a motion capture arena of about 4x7x3 meters (lxwxh), with an Optitrack system running at 120 Hz.
During the project SURE, and then for several BSc and MSc final projects we tested the implementation of safe platooning algorithms on a set of small scale, autnomous RC cars. The cars, based on a platform produced by Erle Robotics (unfortunately no longer in business), features the following
- 1/10th RC car platform, with high torque custom motors
- Erle Brain local controller, based on a Raspberry PI 3
- NVidia Jetson TX2 single board computer for real time stereo vision
- Zed camera for stereo vision imaging
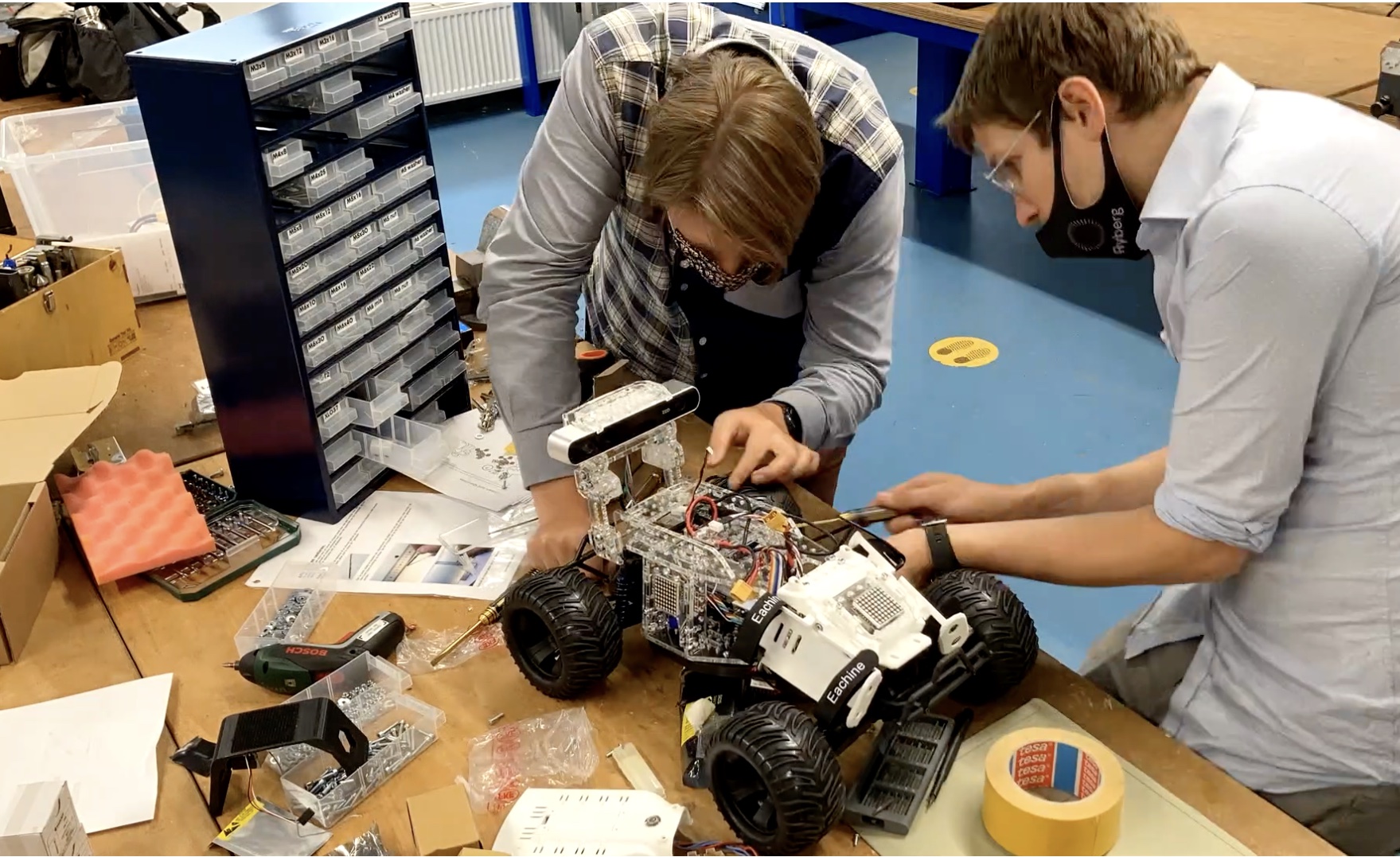
While originally the RC cars had only the Raspberry PI onboard controller, an NVidia Jetson and a Zed stero camera were added later through custom modifications (including PCBs and 3D printed or laser cut components). A peculiarity of the custom cars is that theyy features on the front, back and sides one controllable led matrix that can be used for visual car-to-car communication, using dot patterns similar to QR codes.
More information on our experimental cars is available here:
- T. De Jager, N. Meinders, T. Van Vugt, and W. Zomerdijk, “Autonomous rc cars for control research and education: Implementation of virtual potential based navigation and platooning,” in 2022 IEEE Conference on Control Technology and Applications (CCTA), pp. 504–509, IEEE, 2022.
- Simon van der Marel, “Development of a Platform for Stereo Visual Odometry based Platooning,” MSc thesis, TU Delft, 2022.
